My research examines the adaptation of autonomous behaviors for entities in participatory virtual environments.
To address this issue, I focus my research on three behavioral properties when modeling virtual entities:
the entity must learn by doing (learning);
the entity is equipped with an autonomous simulated world to predict the behavior of "its" world (anticipating);
the entity considers human participants as privileged actors to guide the adaptation of its behavior (human "in the loop").
My research addresses one or more of these three points.
My research activities have resulted in various applications:
SAGITTAIRE : Sociocommunicative Abilities by Gesture Improvement Through Temporal Active Interaction in Robotic Environments
INCIDENT : INtelligent Coffee gradIng anD disEase ideNtificaTion
SOMBRERO : socio-communicative behaviors in humanoid robots
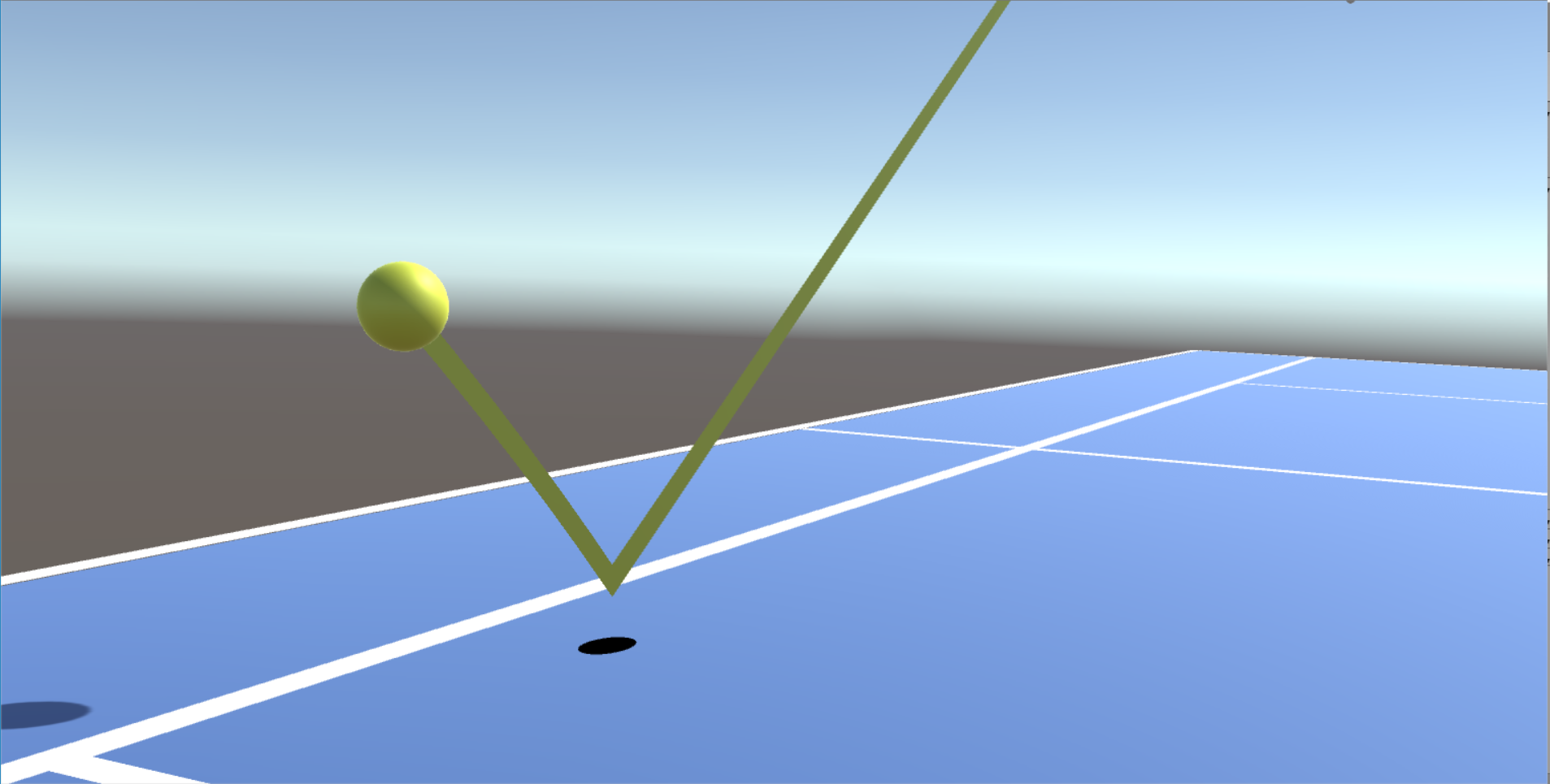
Smart Tennis Court : video analysis to help players in conflicting situations
To create credible human-robot interaction, robots must have the ability to
exhibit non-verbal behavior similar to human. However, human interactions are
too complex to be implemented as behavior patterns. In SAGITTAIRE project
(Sociocommunicative Abilities by Gesture Improvement Through Temporal
Active Interaction in Robotic Environments), we create an application for
Robocup@home. The project aims to develop interaction skills of robot. Neural
networks allow to use big data such as videos and can be train with
unsupervised learning. Unsupervised learning means that representation of
environment and knowledges will be learned by the network without human
help. Previous approaches will be used to model the 3 parts of robotic agents :
perception, decision and action. Robot should perceive human behavior and
choose the appropriate behavior. The defined action to do must be generated. To
perform, each part will be trained with corresponding data.
Supervision:
A. Legeleux (Master Thesis)
We propose to design a system that can detect and classify plant diseases from
leaf images taken under the uncontrolled environment. The system (INCIDENT - INtelligent Coffee gradIng anD disEase ideNtificaTion) should classify diseases
from images taken from any device under the natural environment.
Convolutional neural network is used to design the system. The challenge here
is to obtain high classification accuracy from the images taken in the wild.
Supervision:
S. Wallelign (PhD)
Collaboration:
Jimma Institute of Technology, Ethiopia
Article :
S. Wallelign, M. Polceanu and C. Buche
Soybean Plant Disease Identification Using Convolutional Neural Network.
31th International Florida Artificial Intelligence Research Society Conference (FLAIRS) ,
AAAI Press, 2018
In this ANR project, the goal is to train humanoid robots (Nina and Roméo) i.e. provide them with sociocommunicative abilities by immersive teleoperation i.e. "beaming" of human pilots.
Supervision: M. Polceanu (post-doc) Collaboration:
GIPSA-Lab
LIG
LIP
Aldebaran Robotics
Article :
F. Lasson, M. Polceanu, C. Buche , P. De Loor
Temporal Deep Belief Network for Online Human Action Recognition
30th International Florida Artificial Intelligence Research Society Conference (FLAIRS) ,
pages 80-85, AAAI Press, 2017
In this project we develop a modular system able to track players and ball rebound locations during a tennis match in real time, using a single, fixed medium resolution camera. The system is designed to run with low cost equipment; i.e. Raspberry PI camera and average PC for image processing. The overall goal is to perform a video analysis and processing. The main challenge represents the use of low-cost systems for determining the statistics of a tennis game.
Collaboration:
ERICSSON
M2S lab
Granit lab (IRISA)
Article :
M. Polceanu, A. Petac, H. Ben Lebsir, B. Fiter and C. Buche
Real Time Tennis Match Tracking With Low Cost Equipment
31th International Florida Artificial Intelligence Research Society Conference (FLAIRS) ,
AAAI Press, 2018
For video game designers, being able to provide both interesting and human-like opponents is a definite benefit to the game's entertainment value. The development of such believable virtual players remains a challenge which has kept the research community busy for many years. However, evaluation methods vary widely which can make systems difficult to compare.
The BotPrize competition has provided some highly regarded assessment methods for comparing NPC believability in a first person shooter game. It involves humans judging virtual agents competing for the most believable bot title. In this paper, we describe a system allowing us to partly automate such a competition, a novel evaluation protocol based on a early version of the BotPrize, and an analysis of the data we collected regarding human judges during a national event.
We observed that the best judges were those who play video games the most often, especially games involving combat, and are used to playing against virtual players, strangers and physically present players. This result is a starting point for the design of a new generic and rigorous protocol for the evaluation of bots' believability in first person shooter games.
Supervision: C. Even (PhD) Collaboration:
VIRTUALYS
GeNeura Lab (Spain)
Article :
C. Even, A-G Bosser and C Buche.
Analysis of the Protocols Used to Assess Virtual Players in Multi-player Computer Games. 14th International Work-Conference on Artificial Neural Networks (IWANN 2017) ,
pages 657-668, LNCS, 2017.
In this research project, we are interested in the out of body experience using virtual reality technologies in the context of body perception. The aim is to participate in a clinical study to help people suffering from eating disorders to improve the image of their body.
Supervision: G. Biannic (Master Thesis) Collaboration:
Bohars Psychiatry Hospital (France)
Article :
C Buche and N Le Bigot.
REVAM: a virtual reality application for inducing body size perception modifications.
International Conference on Cyberworlds
,
pages 229-236, IEEE, 2018.
In this project, our aim is to test and optimize various solutions that are developed with the help of machine learning and vision algorithms in order to detect objects.
The application is designed for NAO robots not only to differentiate his teammates from his opponents, but also to localize them.
The presented methods need to be optimized so that the code can run on the NAO robot, the detection process must use less than 5% of its CPU and in the same time not exceed 20 ms/cycle.
The challenge is to find a balance between the fast algorithms and a good performance.
Supervision: A. Petac (Master Thesis) Collaboration:
University of Miami (USA)
Article :
M. Polceanu, F. Harrouet and
C Buche.
Fast Multi-Scale fHOG Feature Extraction Using Histogram Downsampling.
RoboCup Symposium
,
2018
This research program provides an early career teachers' interactions with a 3D virtual classroom occupied by 3D interactive virtual students simulating disruptive children, as a training practice opportunity for novice teachers on how to manage a disrupted classroom before the novice start teaching. The training is tailored to simulate classroom from poor neighborhoods, one helps to learn by interacting with 1st-2nd grade virtual students, and another helps with 6th-7th grade students.
Supervision: A. Delamarre (PhD Thesis) Collaboration:
A. Delamarre, C. Buche, S. Lunn, G. Ruiz, E. Shernoff and C. Lisetti
Interactive Virtual Training (IVT) a serious game to help early career teachers with classroom management.
30th International Florida Artificial Intelligence Research Society Conference (FLAIRS) ,
pages 400-403, AAAI Press, 2017
We propose to use an emotional conversational agent (ECA) in combination with a narrative generation engine issued from interactive storytelling research to provide varied situations. This
approach reflects the combination of both role-play and problem solving exercises on which remediation therapies rely,
and has the potential to support patient's progress and motivation through the rehabilitation programme.
Supervision: C. Even (Master Thesis) Collaboration:
C. Even, A-G. Bosser, J. F. Ferreira, C. Buche, F. Stephan, M. Cavazza and C. Lisetti
Supporting Social Skills Rehabilitation with Virtual Storytelling
29th International Florida Artificial Intelligence Research Society Conference (FLAIRS) ,
pages 329-334, AAAI Press, 2016
We propose a clinical decision support based on machine learning approach to detect the type and the severity of haemophilia using thrombograms. Thrombograms are temporal series that represent the evolution of the rate of thrombin during a hemorrhage. This project is funded by the society Diagnostica Stago.
Supervision:
This work is the subject of a partnership with the society Virtualys. It focuses on the acquisition of behavior (property 1) by imitation of human behavior (property 3) in virtual environments such as video games. The principle of learning is based on the fact that a user participates in the simulations, according to a principle of substitution, taking control of an entity and identifying with it. The controlled entity can then learn behaviors that are better adapted to its environment from the human. Unlike conventional approaches, the learning is not guided by criteria related to the performance of the entity (such as scores). It is conditioned by its believability in approaching "human standards". This project is applied to video games that seek to immerse players in simulations that aim to be as real as possible, through simulated complex environments. Researchers can thus overcome some technical difficulties (rendering, physics, management, network, etc..) and focus on the implementation of behavior. In addition, video games are intended for humans, they offer a real challenge for the entities in terms of behavioral believability. Also, they provide a community of experts in these environments in the presence of human players, allowing to obtain critical relevant on the entity believability.
Supervision:
F. Tence (Master Thesis)
F. Tence (PhD Thesis)
J. Soler (PhD Thesis)
CHAMELEON in UnrealTournament
Articles :
J. Soler, F. Tence, L. Gaubert and Buche C.
Data Clustering and Similarity.
In Proceedings of the Twenty-Sixth International Florida Artificial Intelligence
Research Society Conference
,
pages
492-495. AAAI, 2013.
F. Tence,
L. Gaubert,
J. Soler,
P. De Loor, and
C. Buche.
CHAMELEON: Online Learning for Believable Behaviors based on Humans Imitation in Computer Games.
Computer Animation and Virtual Worlds (CAVW),
24(5):477-495, 2013.
F. Tence,
L. Gaubert,
J. Soler,
P. De Loor, and
C. Buche.
Stable Growing Neural Gas:
a Topology Learning Algorithm based on Player
Tracking in Video Games.
Applied Soft Computing,
13(10):4174-4184, 2013.
F. Tence,
L. Gaubert,
P. De Loor and
C. Buche.
CHAMELEON: A Learning Virtual Bot For Believable Behaviors In Video Game.
International Conference on Intelligent Games and Simulation
(GAMEON'12)
, pages 64-70, Eurosis, 2012.
F. Tence, C. Buche, P. De Loor, and O. Marc.
Learning a representation of a believable virtual character's
environment with an imitation algorithm.
First annual Pan-Arabic International
Conference on Intelligent Games and Simulation (GAMEON-ARABIA'10), pages
141-145. Eurosis, 2010.
In this work, we take inspiration from cognitive science, specifically from how humans perform mental simulation to anticipate events in the world around them, with the aim of obtaining an autonomous agent that makes decisions and adapts itself to novel situations. The mental simulation paradigm enjoys significant interest from the cognitive science community, but computational approaches to mental simulation rely on specialized simulators for a given task and thus are limited to specific scenarios. Our contribution is a generic agent architecture (ORPHEUS) which supports decision-making based on the simulation of functional models of the world ahead of time, inspired from how humans imagine the outer world and the outcomes of their actions based on the state of the real environment.
Supervision: M. Polceanu (PhD Thesis)
ORPHEUS applications:
Angry Birds
Orphy the cat
NAO robot goalkeeper
Articles :
M. Polceanu and
C. Buche
Computational mental simulation: a review. Computer Animation and Virtual Worlds (CAVW) 2016.
C. Buche
, N. Le Bigot and M. Polceanu.
Simulation within Simulation for Agent Decision-Making: Theoretical Foundations from Cognitive Science to Operational Computer Model
Cognitive Systems Research,
40:46-58, 2016.
M. Polceanu,
M. Parenthoen
and
C. Buche.
ORPHEUS: Mental Simulation as Support for Decision-Making in a Virtual Agent
28th International Florida Artificial Intelligence Research Society Conference (FLAIRS)
,
pages 73-78, AAAI Press, 2015.
M. Polceanu and
C. Buche.
Towards A Theory-Of-Mind-Inspired Generic Decision-Making Framework
International Joint Conference on Artificial Intelligence (IJCAI), Symposium on AI in Angry Birds, arXiv preprint arXiv:1405.5048, 2014
This project is part of our work on integrating a proactive process by internal simulation for our virtual actors (property 2) in environments involving the human user (property 3). This principle is illustrated by the development of an artificial 3D juggler. For this application, the juggler can be characterized as proactive: it predicts the behavior of balls in the air and uses their predictions to coordinate its behavior in order to juggle. In addition, an interface allows a human actor to throw a ball to the virtual juggler.
Supervision: A. Jeannin-Girardon (Master Thesis)
Articles :
C. Buche and P. De Loor.
Anticipatory behavior in virtual universe,
application to a virtual juggler.
Computer Animation and Virtual Worlds (CAVW), 24(2):111-125,
2013
C. Buche, A. Jeannin-Girardon, and P. De Loor.
Simulation theory and anticipation as a basis for interactive virtual
character in an uncertain world. Application to a human-virtual characters
interaction for juggling.
Computer Animation and Virtual Worlds (CAVW), Computer Animation
and Social Agents (CASA'11) Special Issue, 22(2-3):133-139, 2011.
This project uses the three behavioral properties that we have established. The perceptual behavior of virtual actors must determine their responses according to external stimuli and also according to internal emotions. The aim is to describe such emotional behaviors using fuzzy cognitive maps where these internal states are explicitly represented. We detail how fuzzy cognitive maps allow the specification, control, internal simulation (property 2) and the dynamic adaptation of perceptual behavior (property 1). We illustrate our approach through an example depicting a shepherd, his herd and sheepdogs. Each entity, according to a principle of substitution, can be controlled by a human user (property 3).
Collaboration:Virtual and Augmented Reality Research Laboratory (Romania)
Articles :
C. Buche, P. Chevaillier, A. Nédélec, M. Parenthoën, and J. Tisseau.
Fuzzy cognitive maps for the simulation of individual adaptive
behaviors.
Computer Animation and Virtual Worlds (CAVW), 21(6):573-587,
2010.
D. M. Popovici, C. Buche, R. Querrec, and F. Harrouet.
An interactive agent-based learning environment for children.
International
Conference on Cyberworlds (CW'04),
pages 233-240. IEEE Computer Society, 2004.
C. Buche, M. Parenthoën, and J. Tisseau.
Learning by imitation of behaviors for autonomous agents.
3rd
International Conference on Intelligent Games and Simulation (GAME-ON'02),
pages 89-93, 2002.
M. Parenthoën, C. Buche, and J. Tisseau.
Action learning for autonomous virtual actors.
3rd International Symposium on Robotics and Automation (ISRA'02),
pages 549-554, 2002.
This project focuses on the realization of a model for learning behaviors online (property 1) by classifiers systems. These are powerful tools for learning interactions between entities and their environments. However, there are many kinds of classifiers systems which differ in terms of numerous subtle technical features. This project analyzes the main kinds of classifiers systems in order to suggest a generic model common to all of them. The implementation of this model is flexible enough to be used for different problems since it provides an interface between the environment and the system. It can be used to quickly test many types of classifiers systems, to make different conceptual assumptions, and to obtain interesting comparative results. It has been used on different problems as labyrinth type applications and management schedule software. This model is also used for the Pegase project.
Supervision: E. Creac'h (Master Thesis)
Article :
C. Buche and P. De Loor.
Generic model for experimenting and using a family of classifiers
systems: description and basic applications.
International Conference on Artificial
Intelligence and Soft Computing (ICAISC'10), Part I, LNCS/LNAI 6113, pages
299-306. Springer, 2010.
This project is funded by the society Diagnostica Stago.
It contributes to our work on learning behaviors for our virtual entities (property 1) involving the human user (property 3) within the field of virtual environments for training. We incorporate an adaptive and generic intelligent tutoring system (ITS) within a virtual environment to provide educational assistance to the learner and pedagogical assistance to the teacher. Our study highlights the need for abstract representation, which must be independent of the task at hand, modifiable for pedagogical decision-making, and connected to the representation of a 3D universe.
Our proposal is a multi-agent system for analyzing the action carried out by the learner using an informed virtual environment. The system highlights a set of information, called the pedagogical situation, considered relevant for making pedagogical decisions. Our study then focuses on a pedagogical agent. It suggests that the trainer should be assisted by the pedagogical situation. Abstraction provides concrete assistance linked to the field, the exercise, and the virtual environment. The behavioral model of the pedagogical agent is based on a hierarchical classifiers system.
Thanks to this model, the agent adapts to the trainer-learner pair, modifying its pedagogical behavior by means of an artificial learning mechanism (property 1) based on reinforcement provided by the trainer (property 3).
Supervision:
G. Faudet (Master Thesis)
T.H. Trinh (Master Thesis)
Y. Cardin (Master Thesis)
F. Le Corre (PhD Thesis)
Y. Cardin (PhD Thesis)
Pedagogical assistance 'simplify the environment':
before
after
before
after
Articles :
C. Hoareau,
R. Querrec,
C. Buche and
F. Ganier.
Evaluation of internal and external validity of a virtual environment for learning a long
procedure.
International Journal of Human-Computer Interaction (IJHCI)
,
2017
C. Buche and R. Querrec.
An expert system manipulating knowledge to help human learners into
virtual environment.
Expert Systems With Applications (ESWA), 38(7):8446-8457,
2011
C. Buche, C. Bossard, R. Querrec, and P. Chevaillier.
PEGASE: A generic and adaptable intelligent system for virtual
reality learning environments.
International Journal of Virtual Reality (IJVR), 9(2):73-85,
2010.
T. Thanh Hai, C. Buche, R. Querrec, and J. Tisseau.
Modeling of errors realized by a human learner in virtual environment
for training.
International Journal of Computers, Communications & Control (IJCCC), 4(1):73-81, 2009.
C. Bossard, G. Kermarrec, C. Buche, and J. Tisseau.
Transfer of training in virtual environments: A new challenge.
Virtual Reality, (12):151-161, 2008.
C. Buche, R. Querrec, P. De Loor, and P. Chevaillier.
MASCARET : A pedagogical multi-agent system for virtual environment
for training.
International Journal of Distance Education Technologies
(JDET), 2(4):41-61, 2004.
F. Le Corre,
C. Hoareau,
F. Ganier,
C. Buche.
and
R. Querrec,
A Pedagogical Scenario Language for Virtual Environment for Learning based on UML Meta-model. Application to Blood Analysis Instrument.
International Conference on Computer Supported Education (CSEDU)
,
pages 301-308, 2014.
C. Hoareau,
F. Ganier,
R. Querrec,
F. Le Corre,
and C. Buche.
Evolution of cognitive load
when learning a procedure in a virtual environment for training
6th International Cognitive
Load Theory Conference,
pages 130-132, 2013.
F. Le Corre,
C. Fauvel,
C. Hoareau,
R. Querrec and
C. Buche.
CHRYSAOR : an agent-based intelligent tutoring system in virtual environment.
International Conference on Virtual Learning (ICVL'12)
, pages 39-45, 2012.