Projet Réseau de capteurs

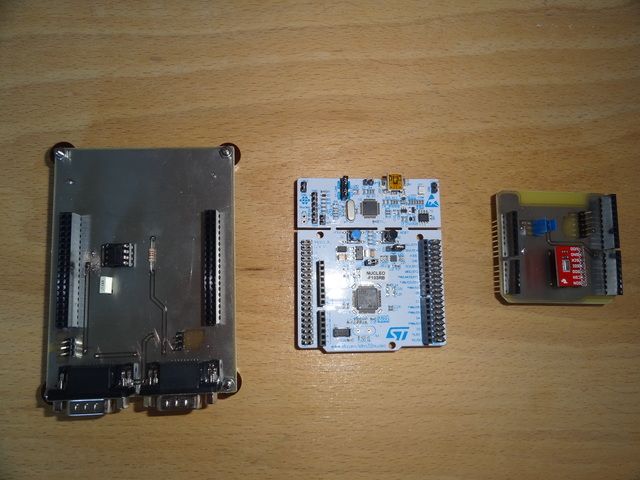
Architecture du Système

Carte Nucleo F103
Périphériques

Environnement de Développement Eclipse
IDE Eclipse
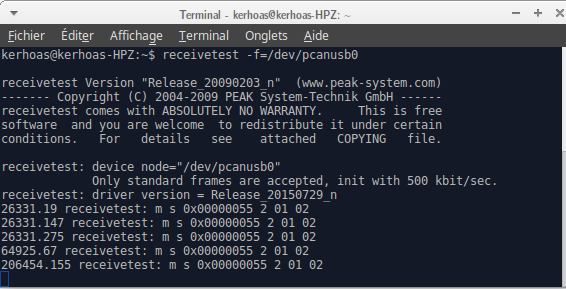
Le Bus CAN
Le bus CAN est un une laison série :
- asynchrone : pas de fil d’horloge (les différents éléments connectés doivent être configurés avec le même débit
- half Duplex : on parle chacun son tour, à condition que le bus soit libre

Le Bus CAN

- Bit de Start : Passage de 1 (état de repos) à 0
- Adresse / Identifiant / champ d’arbitrage
- Champ de Commande : Nombre d’octets dans le champ de données
- Champ de données
- Champ de CRC : Calcul sur les données envoyées permettant de détecter des erreurs de transmission
- Champ de ACK : Tout message doit être acquité ; le destinataire doit forcer le bus à 0
- Fin de Trame
Le Bus CAN
Capture d’une Trame avec Analyseur Logique SALEAE :

Le Bus CAN
Arbitrage

Le Bus CAN
REMARQUE : Format Standard/Etendu

Le Bus CAN
Modèle ISO du Bus CAN
La norme CAN spécifie les couches Physique et Liaison de données uniquement.
D’autres protocoles (devicenet, canopen, ..) spécifient les couches hautes.

Le Bus CAN
La Couche Physique
Le bit Stuffing

Le Bus CAN
La Couche Physique
Une liaison différentielle
Le Bus CAN
Les autres Trames
Trame de requête (Request Frame)

Le Bus CAN
Les autres Trames
Trame d’erreur (Error Frame)

Capteur de Pression MPL115A1
Mesure de la pression

Anemomètre SOMFY

Capteur Centrale Inertielle 9 axes Invensense MPU9250

Capteur Centrale Inertielle 9 axes Invensense MPU9250
Traitement des Données
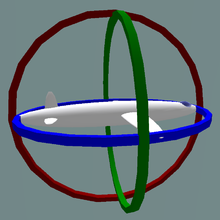
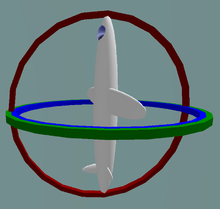
Angles d’Euler

Problème du “Gimbal Lock” (blocage de cardan)
Capteur Centrale Inertielle 9 axes Invensense MPU9250
Traitement des Données
Quaternions

\( Q=\begin{bmatrix}
q _{0},\
q _{1},\
q _{2},\
q _{3}\
\end{bmatrix} \)
\( Q=\begin{bmatrix}
cos(\frac{\theta} {2}),\
a.sin(\frac{\theta} {2}),\
b.sin(\frac{\theta} {2}),\
c.sin(\frac{\theta} {2})\
\end{bmatrix} \)
\( Q _{k+1}=Q _{k}+ \frac{1}{2}.T _{e}.\Omega _{k}.Q _{k} \)
Capteur Centrale Inertielle 9 axes Invensense MPU9250
Traitement des Données
Algorithme de Madgwick

code madgwick.c
Déroulement du Projet
Durée : 12UC
Salle : E021
Cahier des Charges
Liste des Objectifs
IHM
Tutoriel Qt Creator
Bus Can et Qt –> cf Qt Bus Can
Affichage 3D des données du capteur MPU9250 –> cf Qt OpenGL