
Le treuil de levage et sa poulie sont entraînés par un moteur synchrone par l’intermédiaire d’un réducteur de vitesse de rapport red=12,5 (red= Ωm/ Ωt) et de rendement η=0,85.
Lors du passage d’un étage à un autre de l’immeuble, la vitesse évolue conformément au profil suivant :

Nous nous limiterons à l’étude d’une montée de la cabine à pleine charge utile.
REGIME STATIONNAIRE (Phase 2 du déplacement)
Q1. Calculer la masse équivalente Meq à lever
La force résistante équivalente exercée par la cabine, le charge utile et le contrepoids sur le cable est Fr=9,81*Meq
Q2. Calculer le couple résistant Crt que développe la charge sur l’arbre du réducteur connecté au treuil
Q3. Calculer la vitesse de rotation Ωt du treuil
Q4. En déduire la puissance mécanique Pa appelée par l’ascenseur
Q5. Calculer la puissance mécanique Pm fournie par le moteur, étant donné le rendement du réducteur.
Q6. Calculer la vitesse de rotation Ωm du moteur
Q7. En déduire la vitesse de rotation Nm du moteur en tr/min
Q8. Calculer le couple moteur Cm que doit fournir le moteur au réducteur
REGIME TRANSITOIRE
Q1. Calculer l’inertie totale, ramenée sur l’axe moteur, prenant en compte l’inertie du moteur, celle du treuil et de la poulie, et l’inertie équivalente de Meq .
Q2. Pour la phase 1, calculer l’accélération linéaire A1
Q3. En déduire l’accélaration angulaire γm1 correspondante ramenée sur l’axe moteur
Q4. En appliquant l’équation fondamentale de la dynamique pour les systèmes tournants au niveau de l’axe moteur, calculer le couple moteur nécessaire pour la phase 1.
Q5. Pour la phase 3, calculer l’accélération linéaire A3
Q6. En déduire l’accélaration angulaire γm3 correspondante ramenée sur l’axe moteur
Q7. En appliquant l’équation fondamentale de la dynamique pour les systèmes tournants au niveau de l’axe moteur, calculer le couple moteur nécessaire pour la phase 3.
Correction (script scilab)

On considère le système suivant constitué d’un moteur électrique, d’un réducteur et d’une charge cylindrique :
Q1. Quelle est la vitesse de rotation du cylindre en tr/min si la vitesse de rotation du moteur d’entraînement est de 1500tr/min ?
Q2. Quel est le couple mécanique fourni par le moteur ?
Q3. Quelle est la puissance mécanique fournie par le moteur ?
Energie Cinétique pour un système en rotation :
\( E_c = \frac{1}{2}J\Omega^2 \)
Q4. En considérant un réducteur sans perte, donc une conservation de cette énergie cinétique, Calculer le moment d’inertie total (cylindre + moteur) ramené sur l’axe moteur. A la mise sous tension,le cylindre est à l’arrêt. Le moteur délivre un couple constant égal à 157 mN.m
On rappelle l’équation fondamentale de la dynamique pour les systèmes tournants :
\( J.\frac{d\Omega}{dt}=Cm-Cr \)
Cr couple résistant lié aux frottements visqueux du cylindre, ramené sur l’axe moteur.
Q5. En appliquant cette équation sur l’axe moteur, la résoudre afin de déterminer le temps nécessaire pour que la vitesse soit égale à 95 % de la vitesse stationnaire.
Correction (script scilab)

Un système de levage est composé :
Le couple résistant de la charge est de 150 N.m, quelle que soit la vitesse.
Le moteur d’entraînement a un couple moyen au démarrage de 12 N.m.
Q1. Calculer la vitesse angulaire du moteur en rad/s
Q2. Calculer la vitesse angulaire du cylindre en tr/min
Q3. Calculer la vitesse linéaire de la masse en m/s
Q4. Calculer le moment d’inertie total du système (en kg.m²), ramené sur l’axe moteur (Inertie du moteur + Inertie du cylindre ramenée sur l’axe moteur + inertie de la masse en translation ramenée sur l’axe moteur)
Q5. Calculer le couple résistant (en N.m) ramené à la vitesse du moteur.
Q6. Après avoir posé l’équation fondamentale de la dynamique pour les systèmes tournants au niveau de l’axe moteur, résoudre cette équation afin de calculer le temps nécessaire (en s) pour atteindre 1450 tr/min, sachant qu’au démarrage le couple moteur est constant et vaut 12 N.m.
Q7. Admettons que nous voulions limiter le temps de démarrage à 0,5 s.. Quel devrait être, dans ce cas, le couple moyen de démarrage du moteur (en N.m) ?
Correction (script scilab)

|
|

|
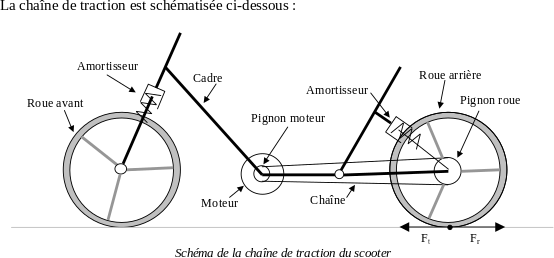
DONNEES TECHNIQUES
Effort Résistant : On suppose que, à vitesse stabilisée, l’effort résistant au niveau de la roue arrière s’exprime par :
Fr=α.M.g+β.V²+M.g.sin(γ)
avec :
Exemple pour une pente de 10 % :

On notera :
Q1. Calculer K1 tel que Ωroue=K1.V
Q2. Calculer K2 tel que Ωmoteur =K2.Ωroue
Q3. Calculer K3 tel que Crmot=K3.Fr
Q4. En appliquant le principe de la conservation de l’énergie cinétique, calcuer l’intertie équivalente Jeq du scooter et de son passager ramenée à l’arbre du moteur.
Q5. Calculer la valeur de l’inertie totale Jtot sur l’axe moteur
Q6. Calculer la vitesse de rotation du moteur Ωmoteur_max correspondant à la vitesse maximale de déplacement.
Q7. En déduire Nmoteur_max vitesse maximale sur l’axe moteur en tr/min
Q8. Pour un déplacement horizontal à la vitesse maximale, calculer le couple résitant Cmoteur_r sur l’axe moteur
Q9. Calculer l’angle γ correspondant à une pente de 10 % (pente maximale pour le démarrage)
Q10. Calculer le couple de démarrage au niveau de l’axe moteur Cd_maxmoteur pour une pente de 10 % (le couple de démarrage correspondant au couple résistant à vitesse nulle)
Q11. En déduire la puissance mécanique maximale du moteur Pmeca.
Q12. On suppose un rendement du moteur de 90 % ; en déduire la puissance électrique maximale absorbée par le moteur Pelec.
Correction (script scilab)
On considère le système de forage embarqué sur un véhicule de chantier suivant :

Q1. Calculer la vitesse nominale de la tête de forage en rad/s
Q2. Calculer le couple total appliqué sur la tête de forage
Q3. En déduire la puissance nominale sur la tête de forage
Le moto-réducteur utilisé présente un rapport de réduction de 1/40.
Q4. Calculer alors la vitesse de rotation nominale, Nm, que le moteur devra présenter.
Q5. Connaissant le rendement du réducteur rd=0,9, calculer la puissance nominale du moteur Pm
Q6. En déduire le couple nominal du moteur Cm
Correction (script scilab)
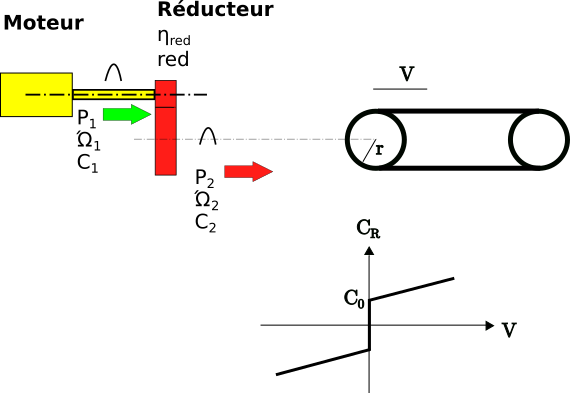
Un tapis roulant est entraîné par un tambour cylindrique de rayon r=10cm.
Celui-ci est mis en rotation par un moteur électrique, par l’intermédiaire d’un réducteur mécanique de rapport de réduction red=15 et de rendement ηred=0.9.
Le couple mécanique résistant sur l’arbre du tambour d’entraînement est Cr=C0+α.V, où V est la vitesse linéaire du tapis, α = 40N.m/(m.s-1) ; C0 est un couple de frottement sec C0=20 N.m.
Le moment d’inertie global ramené sur l’axe du tambour d’entraînement du tapis est J=2 kg.m2.
La vitesse de rotation du moteur est N1=1000tr/min.
Q1. Déterminer la vitesse linéaire V du tapis
Q2. Déterminer le couple résistant opposé par le tapis.
Q3. Déterminer la puissance mécanique P2 correspondante
Q4. En déduire la puissance mécanique que doit fournir le moteur
Q5. En déduire le couple que doit fournir le moteur
Le moteur utilisé est un moteur synchrone triphasé, de puissance nominale 500W, alimenté en 48V
On cherche à déterminer les caractéristiques LBE et KΦ du moteur (la résistance statorique R est négligée).
p=1 (1 paires de poles)
Pour cela l’essai suivant est réalisé :
Vi (V) : 33.56
I (A) : 3
N (tr/min) : 5000
υ (°) : 0
φ (°) : 13.31
Q6. Dessiner l’allure du diagramme de Behn-Eshenburg correspondant à cet essai
Q7. En déduire la valeur de LBE
Q8. En déduire la valeur de KΦ
Correction (script scilab)
Un robot a une masse totale M=25kg. Il est muni de 3 roues. Les 2 roues motrices ont un diamètre D=20cm.
Son moment d’Inertie, ramené à l’axe de propulsion est Jr=0.25kg.m2.
La vitesse maximale de déplacement est Vm=3m/s.

Les déplacements se font :
Lorsque le robot se déplace sur une surface horizontale, ce qui sera le cas dans tout le problème, le couple résistant Cr sur l’axe de propulsion dépend de la vitesse de déplacement selon la loi :
La motorisation est assurée par un moteur synchrone dont l’arbre entraîne l’axe de propulsion par l’intermédiare d’un réducteur de vitesse, dont on néglige les pertes, de rapport de réduction K=5.
Le moment d’intertie du rotor du moteur par rapport à son axe de rotation est Jm=0.01 Kg.m2
On notera :
Q1. Déterminer la vitesse de rotation Ω1 et N1 du moteur correspondant à ce fonctionnement
Q2. Déterminer le couple que doit fournir le moteur dans ces conditions.
Q3. Calculer la puissance mécanique correspondante
Q1. Représenter graphiquement l’évolution de la vitesse et de l’accélération en fontion du temps.
Faire apparaître Vm
Q2. Calculer la valeur de l’accélération permettant au robot, initialement à l’arrêt, d’atteindre la vitesse maximale Vm en 1.5 s
Q3. En déduire l’accélération angulaire d Ω1/dt du moteur d’entraînement
Q4. Déterminer l’intertie totale ramenée sur l’axe moteur
Q5. Donner l’expression, en fonction du temps, du couple résistant Cr appliqué sur l’arbre du moteur pendant l’accélération.
Q6. En déduire l’expression, en fonction du temps, du couple C1m que doit fournir le moteur pendant la phase d’accélération (appliquer l’équation fondamentale de la dynamique pour les systèmes tournants)
Un essai est réalisé sur le moteur avec les résultats suivants :
U=100V
I=2A
ν=0
φ=40°
N=500 tr/min
Q1. Tracer l’allure du diagramme de Behn Eschenburg correspondant
Q2. Déterminer la valeur de l’inductance Lbe
Q3. Déterminer le coefficient K.ϕ
Correction (script scilab)
